Глоссарий основных терминов и определений используемых на сайте
Автоматическое распознавание номеров контейнеров (ACCR - Automatic Container Code Recognition)
— технология, используемая для распознавания идентификационных номеров контейнеров, нанесенных по международному стандарту ISO 6346, используя видеопоток или статичные изображения как источник исходных данных. Применяется в программном пакете INTLAB CONTAINER SDK.
Автоматическое распознавание номерных знаков автомобилей (ANPR - Automatic Number-Plate Recognition, ALPR - Automatic License-Plate Reader, AVI - Automatic Vehicle Identification)
— технология, использующая оптическое распознавания символов на изображениях (Optical Character Reader, OCR) для считывания номерных знаков транспортных средств, фиксируемых различными системами видеонаблюдения. Данная технология широко используется по всему миру в целях обеспечения правопорядка, проверки регистрации автомобилей, предотвращения преступлений, автоматизированного взимания платы а также общего контроля трафика.
API, интерфейс прикладного программирования, application programming interface)
— набор данных, содержащий в себе определения сигнатур функций и структур данных, протоколы и классы объектов и открытые методы, предназначенные для создания прикладного программного обеспечения: по сути, множество четко определенных способов взаимодействия между разными компонентами программы. Грамотно реализованный API облегчает разработку программного обеспечения, предоставляя программисту все необходимые средства для разработки специфического функционала, использующего данный интерфейс. API могут обладать веб-приложения, компоненты операционной системы или аппаратного обеспечения (firmware), а также системы управления базами данных и различные библиотеки.
CCTV (video surveillance system, система видеонаблюдения)
— система телевидения замкнутого контура, в которой видеопоток не транслируется на общедоступные источники, но строго замыкается на четко определенное число “получателей”, коими могут являться как сотрудники предприятия, так и программно-аппаратные комплексы ( аналоговые и цифровые) для долговременного хранения и обработки видеоинформации. Компьютерные сети, представляя из себя удобный и быстрый “транспорт” для цифрового видеосигнала, позволяют не ограничивать расстояние между “источником” и “получателем” данных в системах CCTV, предполагая различные механизмы защиты от перехвата (кодирование и неполнота сигнала, проверка подлинности источника и отправителя).
Компьютерное зрение (Computer vision)
Компьютерное зрение — научная область, основной целью которой является наделение компьютера (машины) зрением, подобным человеческому или даже превосходящим его. В системах компьютерного зрения происходит извлечение, анализ и интерпретация полезной информации, содержащейся в отдельном изображении или последовательности изображений.
Глубокое обучение, глубинное обучение (deep learning)
Глубокое обучение — применение искусственных нейронных сетей, содержащих более одного скрытого слоя, для решения задач обучения. Глубокое обучение уже стало частью передовых систем в самых разных областях. В частности, оно применяется в задачах компьютерного зрения и автоматического распознавания речи.
Искусственный интеллект (ИИ, AI, Artificial intelligence)
Искусственный интеллект — это интеллект, проявляемый машинами (компьютерами). В информатике область исследования ИИ определяет себя как изучение так называемых «интеллектуальных агентов» — устройств, которые воспринимают свое окружение и предпринимают действия для повышения вероятности достижения определенной цели. В обиходе термин «искусственный интеллект» означает, что машина имитирует когнитивные (познавательные) функции, такие как «обучение» и «решение проблем», традиционно приписываемые человеческому разуму.
Цифровая обработка изображений (Digital image processing)
— процесс обработки информации, при котором входными данными являются изображения в цифровой форме. Целью обработки может являться как модификация исходного изображения (пост-процессинг, улучшение качества, устранение искажений или изменение цветовой гаммы), так и анализ содержимого (анализ текста или отдельных символов, распознавание образов и определение объектов).
Intlab Auto LPR
Intlab Auto LPR — SDK для интеграции функции распознавания номеров автомобилей, использующий технологию ANPR.
Intlab Auto MMR
Intlab Auto MMR - SDK для интеграции функции оптического распознавания типов, марок и моделей автотранспортных средств, построенный на технологии MMR.
Intlab Coach
Intlab Coach - SDK для интеграции функции оптического распознавания восьмизначных двухстрочных номеров пассажирских и почтовых вагонов (колея 1520 мм), нанесенных по стандарту стран СНГ.
Intlab Container
Intlab Container - SDK для интеграции функции оптического распознавания вертикальных и горизонтальных идентификационных номеров грузовых контейнеров (нанесенных в формате ISO 6346). Использует технологию ACCR.
Intlab Recognition Engines
Intlab Recognition Engines - семейство SDK для оптического распознавания объектов, созданное компанией Intlab, включающее в себя такие программные продукты как INTLAB AUTO LPR, INTLAB AUTO MMR, INTLAB WAGON, INTLAB COACH, INTLAB UIC и INTLAB CONTAINER.
Intlab Wagon
Intlab Wagon - SDK для интеграции функции оптического распознавания восьмизначных номеров вагонов стран СНГ и других стран, где используется колея 1520 мм.
Intlab UIC
Intlab UIC - SDK для интеграции функции оптического распознавания номеров локомотивов, платформ, цистерн и грузовых железнодорожных вагонов (колея 1435 мм), нанесенных согласно стандарту UIC (Международный Союз Железных дорог, International Union of Railways).
Интеллектуальная транспортная система (ИТС, ITS, Intelligent Transportation System)
— система управления транспортной инфраструктурой, в которой современные информационно-коммуникационные технологии и телематические технологии используются для поиска оптимальных решений по управлению транспортным потоком с целью обеспечения максимальной мобильности и безопасности передвижения, а также эффективности взаимодействия среди участников движения. Директива Еврокомиссии 2010/40/EU от 7 июля 2010 года относит термин “ITS” к системам автомобильного транспорта, но не ограничивает его применение и к остальным видам.
Составными частями системы ИТС могут являться:
- автоматическая фиксация нарушений Правил Дорожного Движения,
- управление светофорами,
- мониторинг условий движения в реальном масштабе времени,
- информирование участников движения о дорожных условиях и ситуациях, о графиках движения общественного транспорта, о наличии свободных мест на парковках и т.д.
- система ГЛОНАСС;
Машинное обучение (Machine learning)
— класс технологий искусственного интеллекта, изучающий методы построения алгоритмов, способных обучаться по одному из двух направлений:
- индуктивное (обучение по прецедентам) основано на выявлении общих закономерностей по частным эмпирическим данным.
- дедуктивное обучение предполагает формализацию знаний экспертов и их перенос в компьютер в виде базы знаний.
Так как дедуктивное обучение принято относить к области экспертных систем, термины “машинное обучение” и “обучение по прецедентам” (индуктивное) можно считать синонимами.
Методы машинного обучения тесно связаны с извлечением информации и интеллектуальным анализом данных (Data Mining) и применяются, в частности, в таких областях, как оптическое распознавание символов, обучение ранжированию и компьютерное зрение.
Распознавание марок и моделей автомобилей (Make and Model Recognition, MMR)
— процесс наиболее точного определения марки и модели автомобиля, используя изображения, полученные с помощью технологии ANPR, при этом наиболее точные результаты достигаются при наличии по крайней мере двух проекций транспортного средства. Базовая классификация автомобилей (грузовой \ легковой …) также входит в этот процесс.
Нейронная сеть (Neural Network)
— математическая модель, а также её программное или аппаратное воплощение, построенное по принципу организации и функционирования биологических нейронных сетей — нервных клеток живого организма. Реализация ИНС как правило представляет собой систему взаимодействующих между собой простых процессоров (искусственных нейронов), выполняющих атомарные операции.
ИНС используются в практических целях: в задачах прогнозирования, для распознавания образов, в задачах управления и др.
Классификация объектов (Object classification)
— процесс назначение объектам семантических меток, одна из фундаментальных задач в области машинного зрения и начальный этап для распознавания и обнаружения объектов, а также семантического анализа изображения.
Обнаружение объектов (Object detection, детектирование объектов)
— технология, основанная на машинном зрении и цифровой обработке изображений, занимающаяся семантическим анализом исходных данных с целью обнаружением экземпляров объектов определенного класса (людей, объектов автомобильного и железнодорожного транспорта и т.д.) с максимальной точностью и возможностью самообучения.
Распознавание объектов (Object recognition)
— следующий этап классификации объектов в технологии машинного зрения, позволяющий воспринимать отличительные свойства объекта (такие, как форма, цвет и текстура) и применять к нему семантические атрибуты (например, идентифицировать его как яблоко). При этом система, отвечающая за распознавание, связывает целевой объект с окружающими и обладает свойствами “понимать” предназначение объекта и “помнить” предыдущие попытки восприятия. Для наглядности, распознанный объект визуально выделяется из исходного изображения.
Трэкинг объектов (Object tracking)
— процесс последовательного определения местоположения движущегося объекта в поле зрения устройства видеозахвата путем покадрового анализа видеопотока.
Основная задача состоит в сопоставлении положений целевого объекта на последовательности кадров, при условии, что объект движется быстро относительно частоты кадров видеопотока. Для ее решения системы трекинга строят модель движения объекта, способную описывать и предугадывать местонахождение с учетом уже сделанных наблюдений. Находит широкое применение в системах безопасности и видеонаблюдения, видеосвязи, анализе и контроле транспортных потоков в системах ITS.
Оптическое распознавание символов (Optical character recognition, OCR)
— процесс преобразование цифровых изображений машинописных, печатных или рукописных текстов в текстовые данные (последовательность кодов символов) для возможности их последующего редактирования или анализа. Источниками данных могут быть отсканированные документы, фото- и видео- материалы а также видеопоток, получаемый в реальном времени.
Конечной целью этого процесса может быть как когнитивные вычисления, машинный перевод и интеллектуальный анализ текста, так и специфические процедуры, связанные с машинным зрением: обнаружение, классификация и распознавание образов различных объектов.
Радиальные искажения (Radial distortion)
— наиболее часто встречающийся тип искажений изображения, вносимых съемочным объективом. Название происходит из-за характерной радиальной симметрии в структуре искажения.
Различают следующие типы радиального искажения:
- отрицательная (“бочка” или “бочкообразное искажения” - barrel distortion):
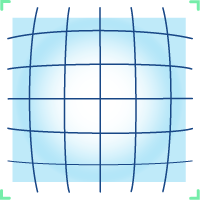
Масштаб изображения уменьшается по мере удаления от оптической оси, искаженное изображение выглядит так, как будто его нанесли на сферу (или на бочку). Такой тип дисторсии может находить практическое применение (например, для получения полусферических снимков объективом “рыбий глаз”). При использовании объектива с переменным значением фокусного расстояния “бочкообразное” искажение начинает проявляться в средней части диапазона фокусного расстояния и усиливается по мере приближения к «широкоугольному» концу этого диапазона.
- положительная (“подушка” или “подушкообразное искажение” - pincushion distortion):
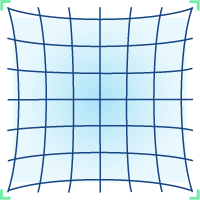
Масштаб изображения увеличивается по мере удаления от оптической оси, так что линии, не проходящие через центр изображения, изгибаются вовнутрь, к центру изображения, из-за чего оно становится похожим на подушку.
- искажение типа “усы” (moustache distortion):
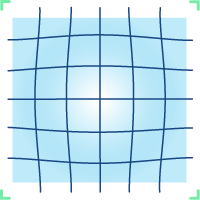
Сочетание и бочкообразного (ближе к центру изображения) и подушкообразного (по мере удаления от него) искажений. Как результат, горизонтальные линии в верхней половине кадра становятся похожими на слегка закрученные вверх усы (в нижней половине кадра усы будут «вверх тормашками»).
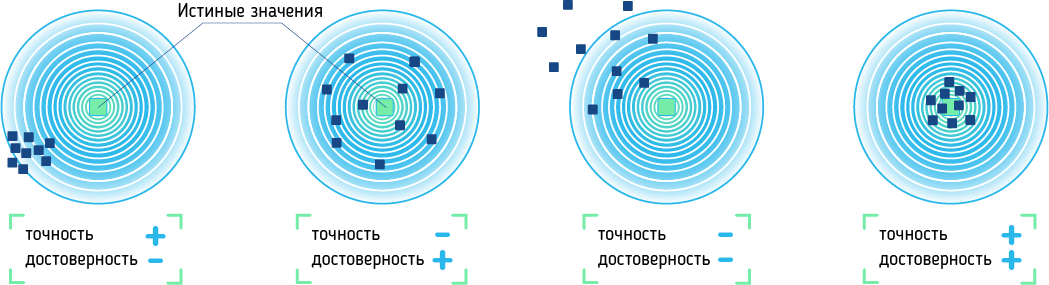
Точность (Precision)
— отношение числа правильно идентифицированных объектов к общему числу предсказанных объектов (отношение количества истинно положительных результатов к сумме истинно положительных и ложно-положительных результатов). Мера точности характеризует, сколько полученных от алгоритма (движка распознавания) положительных ответов являются правильными, однако, не дает представления о том, какую долю верных отрицательных ответов вернул алгоритм.
Полнота (Recall)
— доля правильно идентифицированных объектов среди общего числа объектов, которые действительно есть на изображении (т.е. отношение числа истинно положительных результатов к сумме истинно положительных и истинно отрицательных результатов). Мера полноты характеризует способность алгоритма (средства распознавания) «предсказывать» как можно большее количество положительных ответов из ожидаемых, но не оценивает долю возможных ложноположительных ответов.
Достоверность распознавания (Recognition accuracy)
— мера оценки качества распознавания какого-либо алгоритма (движка распознавания), обычно оценивается с помощью формулы, F = 2 * (Precision * Recall) / (Precision + Recall), где показатели PRECISION и RECALL используются для обеспечения исчерпывающей характеристики алгоритма: Recall демонстрирует способность алгоритма обнаруживать данный класс вообще, а Precision — способность отличать этот класс от других. Достоверность Распознавания отражает баланс между показателем Precision (уменьшая который, мы делаем алгоритм “оптимистичнее”, увеличивая количество ложноположительных результатов) и Recall (снижение показателя которого означает большее число “отбракованных” правильных ответов).
Иллюстрация “вклада” каждой из характеристик:
Research & Development (НИОКР)
— совокупность работ, направленных на получение новых знаний и практическое применение при создании нового изделия или технологии. Как правило, включают в себя два этапа:
- Научно-исследовательские работы поискового, теоретического и экспериментального характера, для определения технической возможности создания новой техники в определенные сроки.
- Опытно-конструкторские и технологические действия по разработке конструкторской и технологической документации на опытный образец, а также испытаниям опытного образца изделия, выполняемых по техническому заданию.
Скользящий затвор (построчный перенос, rolling shutter)
— способ получения изображения, при котором отдельно взятый кадр формируется не целиком, а путем построчного считывания информации с формирующей матрицы. Противоположностью данного способа является «полнокадровый затвор» (англ. Global Shutter), формирующий кадр одномоментно, но значительно проигрывающий Rolling Shutter в качестве полученного изображения. Технология Rolling Shutter используется в аппаратах, оборудованных КМОП-матрицами (комплементарная структура металл-оксид-полупроводник), преимущества которых перекрывают недостатки этой технологии.
Изображения, полученные таким образом, искажаются из-за того, что объект смещается относительно фото- или видео- оборудования за время считывания всех строк с матрицы т.е. части объекта визуально разнесены между собой. Основной способ борьбы с искажениями такого рода - пост-обработка фото- и видео- материала в специализированных редакторах.
Альтернативой КМОП-матрицам являются приборы с зарядовой связью (ПЗС), намного лучше справляющиеся с задачами регистрации движущихся объектов с опознавательными знаками (как, например, идентификационными номерами на ж\д вагонах) за счет более высокой чувствительности, позволяющей бороться с артефактами изображения. Основной их недостаток - высокая стоимость.
SDK (комплект средств разработки, комплект для разработчика, software development kit)
— набор программных библиотек и интерфейсов, позволяющий разработчикам создавать приложения для определённого пакета программ, аппаратной платформы или операционных систем и других платформ. SDK, используя преимущества и функционал каждой платформы, а также включая в себя примеры кода и техническую документацию, значительно сокращает время интеграции между системами.
UIC
— международная организация, объединяющая национальные железнодорожные компании с целью совместного решения задач в области развития железнодорожного транспорта, созданная 20 октября 1922 года с целью унификации процедур и гармонизации отношений между железными дорогами европейских стран при осуществлении международных железнодорожных перевозок. На сегодняшний день включает в себя около 199 членов со всех пяти континентов, где имеется железнодорожное сообщение.
Распознавание номеров вагонов стран СНГ (Wagon CIS Number Recognition, Wagon CIS Code Recognition)
— технология распознавания номеров локомотивов, пассажирских и грузовых железнодорожных вагонов стран СНГ, используемая INTLAB WAGON.
Распознавание UIC номеров вагонов (Wagon UIC Number Recognition, Wagon UIC Code Recognition)
— технология распознавания номеров локомотивов, пассажирских и грузовых железнодорожных вагонов, используемая INTLAB UIC.